3、Robotic arm avoiding
Website:http://docs.ros.org/en/melodic/api/moveit_tutorials/html/index.html
HD camera MoveIt:~/software/transbot_library/src/transbot_config_camera
Astra_MoveIt:~/software/transbot_library/src/transbot_config_astra
Robotic arm control function package :~/software/transbot_library/src/transbot_description
Before usingg this function, we need to close the APP remote control process and all the functions that have been turned on. MoveIT recommends running in a virtual machine.
(The computer must have a discrete GPU!!!)
3.1、Start
This lesson is mainly to learn the random movement MoveIT simulation.
Taking the HD camera configuration as an example, the Astra configuration is similar.
Virtual machine side
roslaunch transbot_config_camera demo.launch # HD camera roslaunch transbot_config_astra demo.launch # astrarosrun transbot_description 02_attached_object # C++rosrun transbot_description 02_attached_object.py # pythonIf you need to combine the real machine, you need to configure multi-machine communication, and it is very dangerous and easy to damage the robot. Inexperienced users are not recommended to connect to the real machine and move randomly.
Drive the real machine(Raspberry Pi)
xxxxxxxxxxrosrun transbot_description 03_machine_move.py
- Load code
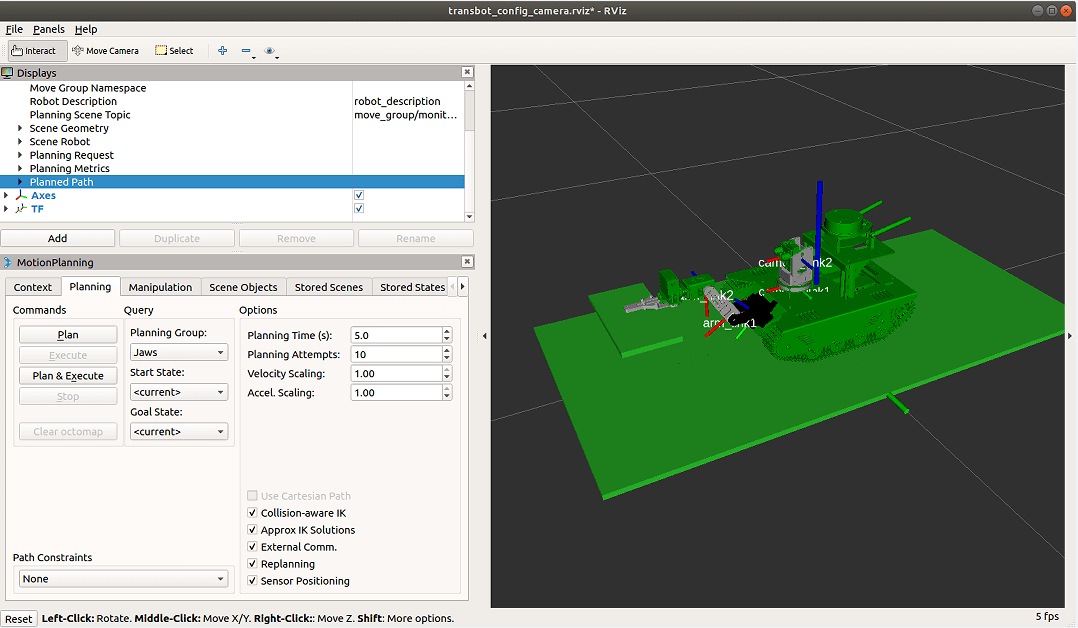
Add to rviz
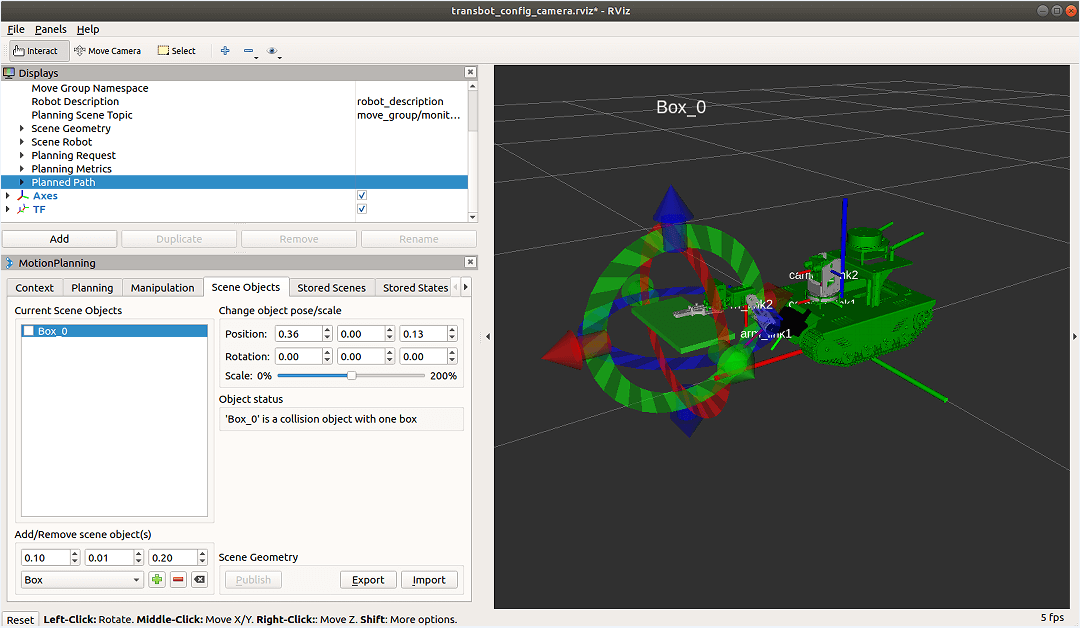
- Click【SceneObjects】in 【MotionPlanning】to enter scene settings,
- Choose【Box】property,
- Adjust scene object(s)parameter【0.10,0.01,0.2】
- Click(+)to add obstacles;Click(-)or(×)to remove obstacles
- Adjust 【Position】property【0.36,0.00,0.13】,change the pose of the cabinet.
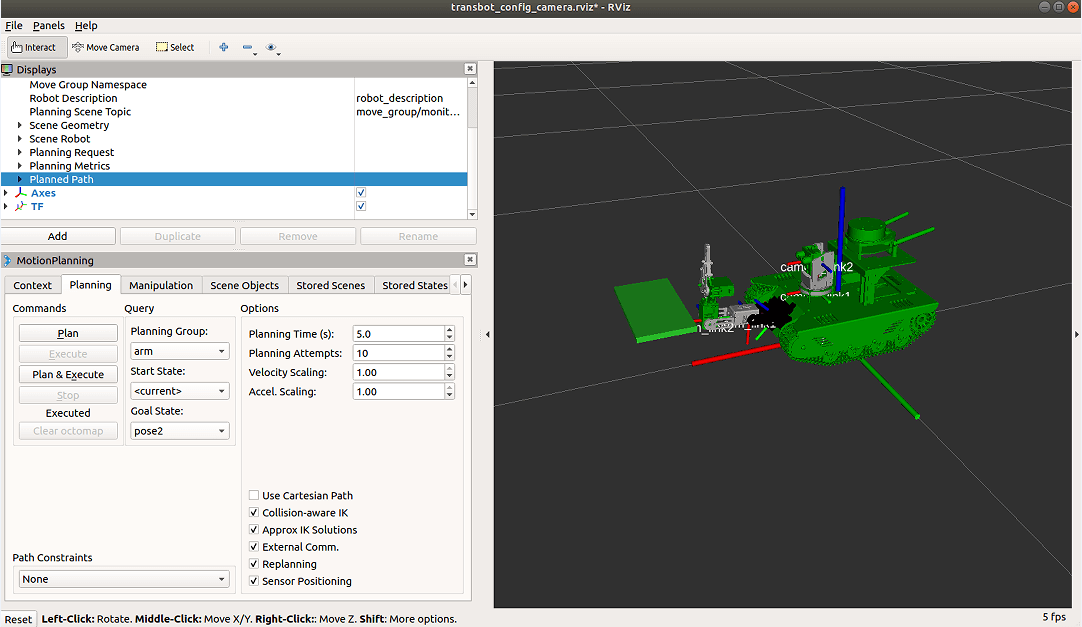
Go back to 【Planning】and plan the robotic arm again. It will never collide with the cuboid, nor can it reach the position of the cuboid.
3.2、Source code analysis
py file
- Basic Settings
xxxxxxxxxx # Initialize move_group API moveit_commander.roscpp_initialize(sys.argv) # Initialize the ROS node rospy.init_node('attached_object_py') # Initialize the scene object scene = PlanningSceneInterface() # Initialize robotic arm transbot = MoveGroupCommander('arm') # When motion planning fails, re-planning is allowed transbot.allow_replanning(True) transbot.set_planning_time(5) # Number of planning attempts transbot.set_num_planning_attempts(10) # Set the allowable target position error transbot.set_goal_position_tolerance(0.01) # Set the allowable target attitude error transbot.set_goal_orientation_tolerance(0.01) # Set the allowable target error transbot.set_goal_tolerance(0.01) # Set maximum speed transbot.set_max_velocity_scaling_factor(1.0) # Set maximum acceleration transbot.set_max_acceleration_scaling_factor(1.0)- Set "pose1" as the target point
xxxxxxxxxx # Set "pose1" as the target point transbot.set_named_target("pose1") transbot.go() sleep(0.5)- Add obstacles
xxxxxxxxxx # Set the height of the desktop table_ground = 0.12 # Set the 3D size of obstacles [length, width, and height] table_size = [0.1, 0.2, 0.01] floor_size = [1, 0.5, 0.01] # Add the table to the scene table_pose = PoseStamped() table_pose.header.frame_id = 'base_footprint' table_pose.pose.position.x = 0.36 table_pose.pose.position.y = 0 table_pose.pose.position.z = table_ground + table_size[2] / 2.0 table_pose.pose.orientation.w = 1.0 scene.add_box('table', table_pose, table_size) floor_pose = PoseStamped() floor_pose.header.frame_id = 'base_footprint' scene.add_box('floor', floor_pose, floor_size)C++ file
- Basic Settings
xxxxxxxxxx // Initialize the ROS node ros::init(argc, argv, "attached_object_cpp"); // Create node handle ros::NodeHandle n; // Set thread ros::AsyncSpinner spinner(1); // Start thread spinner.start(); // Initialize the robotic arm moveit::planning_interface::MoveGroupInterface transbot("arm"); // Allow replanning transbot.allowReplanning(true); // Planning time (unit: second) transbot.setPlanningTime(5); //Set the number of planning attempts transbot.setNumPlanningAttempts(10); //Set the allowable target attitude error (unit: meter) transbot.setGoalPositionTolerance(0.01); //Set the allowable target position error (unit: radians) transbot.setGoalOrientationTolerance(0.01); //Set maximum speed transbot.setMaxVelocityScalingFactor(1.0); //Set maximum acceleration transbot.setMaxAccelerationScalingFactor(1.0);- Set "pose1" as the target point
xxxxxxxxxx //Set the target point transbot.setNamedTarget("pose1"); //Start moving transbot.move(); sleep(0.1);- Add obstacles
xxxxxxxxxx /////////////////////////Add obstacles/////////////////////// vector<string> object_ids; scene.removeCollisionObjects(object_ids); //Create the detection object container vector<moveit_msgs::CollisionObject> objects; //Create collision detection object moveit_msgs::CollisionObject obj; //Set the id of the obstacle obj.id = "obj"; object_ids.push_back(obj.id); //The state of the obstacle obj.operation = obj.ADD; //Set the header information of the obstacle obj.header.frame_id = frame; shape_msgs::SolidPrimitive primitive; shape_msgs::SolidPrimitive floor; //Set obstacle type primitive.type = primitive.BOX; floor.type = primitive.BOX; //Set obstacle dimensions primitive.dimensions.resize(3); floor.dimensions.resize(3); //Set the length, width and height of obstacles primitive.dimensions[0] = 0.2; primitive.dimensions[1] = 0.1; primitive.dimensions[2] = 0.01; obj.primitives.push_back(primitive); floor.dimensions[0] = 1; floor.dimensions[1] = 0.5; floor.dimensions[2] = 0.01; obj.primitives.push_back(floor); geometry_msgs::Pose pose; geometry_msgs::Pose pose1; //Set the location information of obstacles [x,y,z] pose.position.x = 0.36; pose.position.y = 0; pose.position.z = 0.125; //Set the posture information of obstacles tf::Quaternion quaternion; //The unit of R, P, Y is angle double Roll = 0.0; double Pitch = 0.0; double Yaw = 90.0; //Convert RPY to quaternion quaternion.setRPY(Roll * M_PI / 180, Pitch * M_PI / 180, Yaw * M_PI / 180); pose.orientation.x = quaternion.x(); pose.orientation.y = quaternion.y(); pose.orientation.z = quaternion.z(); pose.orientation.w = quaternion.w(); //Set the pose information of obstacles obj.primitive_poses.push_back(pose); obj.primitive_poses.push_back(pose1); objects.push_back(obj); /////////////////////////Set the color of obstacles/////////////////////// //Create a color container for the detection object std::vector<moveit_msgs::ObjectColor> colors; //Create a color instance moveit_msgs::ObjectColor color; //Add the id that needs to set the color color.id = "obj"; //Set RGBA value, range [0~1] color.color.r = 0; color.color.g = 1.0; color.color.b = 0; color.color.a = 0.5; colors.push_back(color); //Add the set information to the scene scene.applyCollisionObjects(objects, colors);